风电齿轮箱是双馈和半直驱传动形式的机组核心部件,也常被认为是传动链上最脆弱的部件。行星齿轮传动被广泛应用,速比大,齿轮箱尺寸比较紧凑。
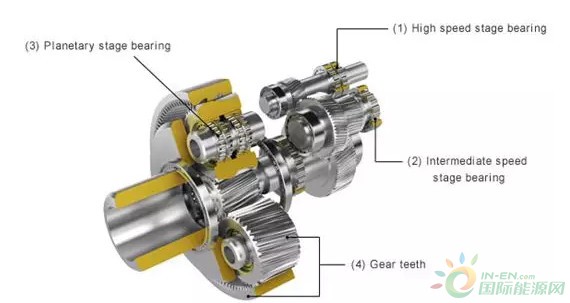
一级行星两级平行三维结构示意图(图片来源网络)
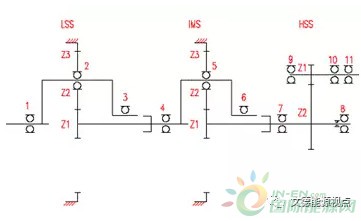
两级行星一级平行齿轮传动原理图
常见行星齿轮传动结构如下图,内齿圈静止不动,输入轴带动行星架旋转(转速与行星架转速一样),行星轮除了自转(转速)还跟随行星架围绕太阳轮公转,这也是为什么我们叫做行星齿轮传动的原因。
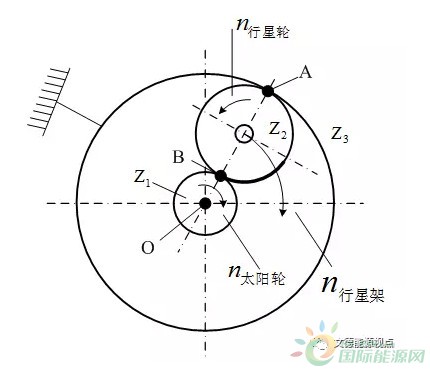
----行星轮自转转速;
----太阳轮转速;
----行星架转速(输入轴转速);
----齿圈的转速(一般齿圈固定不动,转速为0)
是齿圈齿数,是行星轮齿数, 是太阳轮齿数, N为行星轮的个数。
先来看看啮合频率的概念。顾名思义,啮合频率就是运行中由于齿轮啮合而产生的振动冲击的间隔频率。风电齿轮箱来说,每级都有一个啮合频率。对于行星级齿轮,行星轮同时与太阳轮和齿圈啮合,具有相同的啮合频率。当行星架带着行星轮旋转一周,恰好齿圈上的每个齿都啮合一次,所以行星级啮合频率实际上就是行星架旋转频率*齿圈的齿数
齿轮箱振动信号分析时,啮合频率下的振动幅值会随着行星轮位置的不同而在箱体测点位置上的响应有差异,因此正常条件下行星轮啮合振动信号会受到转频或N倍转频的调制。
而齿轮箱故障中除了齿轮故障外,轴承是最常见的一种故障形式,根据美国NREL的一份统计报告,其统计的257例故障中,轴承故障占到180例,占到70%多。同时高速级的故障比例比较高。(具体数据见下表)
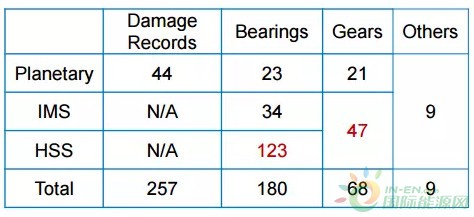
所有的齿轮箱轴承故障中,行星轮轴承出现故障的诊断难度最大,主要原因是行星轮轴承故障信号传递到齿圈上的路径较长,浮动太阳轮对冲击能量进行平衡和消减,同时轴承位置随着行星架旋转也加大了检测难度。通常出现行星轮轴承故障早期,振动幅值没有明显的增加,很难通过振动幅值超出标准进行诊断。不过如果行星轮轴承出现问题,行星轮轴承的故障特征频率会被输入轴转频调制,因此要仔细捕捉这样的振动信号。同时应选择抗干扰能力强的传感器,并进行相应的滤波处理以规避较大的高频和直流分量对分析的影响。也建议增加油液监测的手段来辅加诊断。如果不提早发现行星轮轴承故障,会加大行星轮突然断裂或断齿从而造成齿轮箱卡死的重大事故的发生概率。
轴承的故障频率的计算方法,可以参考本公众号前序文章,这里就不重复了。这里的关键是要获取轴承所处的轴的转速,对于行星级就是根据行星轮自转转速计算行星轮轴承的故障特征频率。太阳轮转速是后续传动的输入转速也要计算,因此我们先来计算这两个转速。
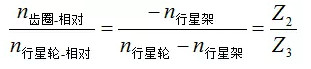
如果假定我们站在行星架上看运动关系,则行星架转速为0,而齿圈相对转速如下

而太阳轮相对转速为

这样对于行星轮与齿圈的啮合关系来说,齿数之比就等于相对转速之比(考虑转速方向)
从而可以得到行星轮转速为
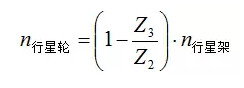
由式可以看出,行星轮的转速方向与行星架转速方向相反,行星轮轴承故障特征频率就可以基于行星轮自转转速进行计算。
对于太阳轮与行星轮的啮合关系来说,齿数之比等于相对转速之比(考虑转速方向)

如果把行星轮转速公式代入上式就可获得太阳轮转速为
太阳轮和行星架的转速方向相同,行星级传动比就是
所谓齿轮的故障特征频率就是指齿轮上的齿出现了故障或瑕疵时,旋转时故障齿轮啮合所产生的振动冲击间隔频率。对于行星级传动,包括行星轮、太阳轮、齿圈三个部件的故障特征频率。下面就来算算,首先是齿圈故障特征频率,假设齿圈上有一个齿出现故障,则行星架旋转一周,N个行星轮通过故障点(N为行星轮个数,一般为3个),则单齿齿圈故障特征频率就为
如果某个行星轮存在一个齿出现故障,则相对转动一圈会啮合2次(分别于齿圈和太阳轮),则其单齿行星轮故障特征频率为

如果太阳轮中的某个齿发生故障,则在行星架静止的相对坐标中,太阳轮相对转一圈故障点则要与N个行星轮啮合N次,则单齿太阳轮故障特征频率为

除了故障特征频率,齿轮箱还有固有频率(自振频率),理论上设计时应该避免齿轮的啮合频率及轴的旋转频率与固有频率重合或接近。过去,对于较小功率等级的齿轮箱,通常不会发生共振问题,也很少做模态分析。但是随着机组大型化,以及整机与齿轮箱集成设计更加紧密,整个传动链的模态分析成为大型风机设计中的重要环节。故障诊断时,也要重点分析是否有固有频率下的较大冲击振动。实际中,现场弹性支承损坏的案例也很多。弹性支承的损坏很多也是由于齿轮箱振动幅值过大引起,多数的主要原因是引发了传动链系统的共振或者受到了强外界激励,其中传动链及弹性支承的装配、弹性支承的刚度与阻尼的设计、整机控制策略等因素影响较大。